
【109.1 按键控制跑马灯的方向。】
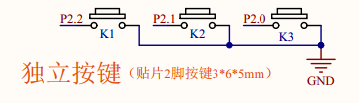
上图109.1.1 独立按键
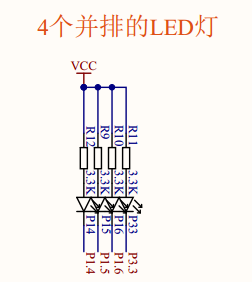
上图109.1.2 LED电路
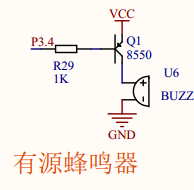
上图109.1.3 有源蜂鸣器的电路
之前108节讲到跑马灯的启动、暂停、停止,本节在此基础上,增加一个“方向”的控制,除了加深理解输入设备如何关联应用程序的程序框架之外,还有一个知识点值得一提,就是如何通过灵活切换switch的“步骤变量”来达到随心所欲的过程控制,本节的“方向”的控制就用到这个方法。
本节例程的功能如下:
(1)【启动暂停】按键K1。按下【启动暂停】按键K1启动之后,跑马灯处于“启动”状态,4个LED灯挨个依次循环的变亮,给人“跑”起来的感觉。此时如果再按一次【启动暂停】按键K1,则跑马灯处于“暂停”状态,如果再按一次【启动暂停】按键K1,跑马灯又变回“启动”状态。因此,【启动暂停】按键K1是专门用来切换“启动”和“暂停”这两种状态。
(2)【停止】按键K2。当跑马灯处于“启动”或者“暂停”或者“停止”的状态时,只要按下【停止】按键K2,当前的运动状态就终止,强制变回初始的“停止”状态,类似“复位”按键的作用。当跑马灯处于“停止”状态时,此时再按下【启动暂停】按键K1之后,跑马灯又处于“启动”状态。
(3)【方向】按键K3。跑马灯上电后默认处于“往右跑”的方向。每按一次【方向】按键K3,跑马灯就在“往右跑”与“往左跑”两个方向之间切换。
\#include "REG52.H"
\#define KEY\_VOICE\_TIME 50
\#define KEY\_FILTER\_TIME 25
\#define RUN\_TIME 200 //跑马灯的跑动速度的时间参数
void T0\_time();
void SystemInitial(void) ;
void Delay(unsigned long u32DelayTime) ;
void PeripheralInitial(void) ;
void BeepOpen(void);
void BeepClose(void);
void VoiceScan(void);
void KeyScan(void);
void KeyTask(void);
void RunTask(void); //跑马灯的任务函数
//4个跑马灯的输出口
sbit P1\_4=P1^4;
sbit P1\_5=P1^5;
sbit P1\_6=P1^6;
sbit P3\_3=P3^3;
//蜂鸣器的输出口
sbit P3\_4=P3^4;
sbit KEY\_INPUT1=P2^2; //【启动暂停】按键K1的输入口。
sbit KEY\_INPUT2=P2^1; //【停止】按键K2的输入口。
sbit KEY\_INPUT3=P2^0; //【方向】按键K3的输入口。
volatile unsigned char vGu8BeepTimerFlag=0;
volatile unsigned int vGu16BeepTimerCnt=0;
volatile unsigned char vGu8KeySec=0;
unsigned char Gu8RunStart=0; //控制跑马灯启动的总开关
unsigned char Gu8RunStatus=0; //标识跑马灯当前的状态。0代表停止,1代表启动,2代表暂停。
unsigned char Gu8RunDirection=0; //标识跑马灯当前的方向。0代表往右跑,1代表往左跑。
volatile unsigned char vGu8RunTimerFlag=0; //用于控制跑马灯跑动速度的定时器
volatile unsigned int vGu16RunTimerCnt=0;
void main()
{
SystemInitial();
Delay(10000);
PeripheralInitial();
while(1)
{
KeyTask(); //按键的任务函数
RunTask(); //跑马灯的任务函数
}
}
void T0\_time() interrupt 1
{
VoiceScan();
KeyScan();
if(1==vGu8RunTimerFlag&&vGu16RunTimerCnt>0) //用于控制跑马灯跑动速度的定时器
{
vGu16RunTimerCnt--;
}
TH0=0xfc;
TL0=0x66;
}
void SystemInitial(void)
{
TMOD=0x01;
TH0=0xfc;
TL0=0x66;
EA=1;
ET0=1;
TR0=1;
}
void Delay(unsigned long u32DelayTime)
{
for(;u32DelayTime>0;u32DelayTime--);
}
void PeripheralInitial(void)
{
//跑马灯处于初始化的状态
P1\_4=0; //第1个灯亮
P1\_5=1; //第2个灯灭
P1\_6=1; //第3个灯灭
P3\_3=1; //第4个灯灭
}
void BeepOpen(void)
{
P3\_4=0;
}
void BeepClose(void)
{
P3\_4=1;
}
void VoiceScan(void)
{
static unsigned char Su8Lock=0;
if(1==vGu8BeepTimerFlag&&vGu16BeepTimerCnt>0)
{
if(0==Su8Lock)
{
Su8Lock=1;
BeepOpen();
}
else
{
vGu16BeepTimerCnt--;
if(0==vGu16BeepTimerCnt)
{
Su8Lock=0;
BeepClose();
}
}
}
}
void KeyScan(void) //此函数放在定时中断里每1ms扫描一次
{
static unsigned char Su8KeyLock1;
static unsigned int Su16KeyCnt1;
static unsigned char Su8KeyLock2;
static unsigned int Su16KeyCnt2;
static unsigned char Su8KeyLock3;
static unsigned int Su16KeyCnt3;
//【启动暂停】按键K1的扫描识别
if(0!=KEY\_INPUT1)
{
Su8KeyLock1=0;
Su16KeyCnt1=0;
}
else if(0==Su8KeyLock1)
{
Su16KeyCnt1++;
if(Su16KeyCnt1>=KEY\_FILTER\_TIME)
{
Su8KeyLock1=1;
vGu8KeySec=1; //触发1号键
}
}
//【停止】按键K2的扫描识别
if(0!=KEY\_INPUT2)
{
Su8KeyLock2=0;
Su16KeyCnt2=0;
}
else if(0==Su8KeyLock2)
{
Su16KeyCnt2++;
if(Su16KeyCnt2>=KEY\_FILTER\_TIME)
{
Su8KeyLock2=1;
vGu8KeySec=2; //触发2号键
}
}
//【方向】按键K3的扫描识别
if(0!=KEY\_INPUT3)
{
Su8KeyLock3=0;
Su16KeyCnt3=0;
}
else if(0==Su8KeyLock3)
{
Su16KeyCnt3++;
if(Su16KeyCnt3>=KEY\_FILTER\_TIME)
{
Su8KeyLock3=1;
vGu8KeySec=3; //触发3号键
}
}
}
/\* 注释一:
\* 本节破题的关键:
\* 在KeyTask和RunTask两个任务函数之间,主要是靠Gu8RunStart、Gu8RunStatus、Gu8RunDirection
\* 这三个全局变量来传递信息。
\*/
void KeyTask(void) //按键的任务函数,放在主函数内
{
if(0==vGu8KeySec)
{
return; //按键的触发序号是0意味着无按键触发,直接退出当前函数,不执行此函数下面的代码
}
switch(vGu8KeySec) //根据不同的按键触发序号执行对应的代码
{
case 1: //1号按键。【启动暂停】按键K1
if(0==Gu8RunStatus) //当跑马灯处于“停止”状态时
{
Gu8RunStart=1; //总开关“打开”。
Gu8RunStatus=1; //状态切换到“启动”状态
}
else if(1==Gu8RunStatus) //当跑马灯处于“启动”状态时
{
Gu8RunStatus=2; //状态切换到“暂停”状态
}
else //当跑马灯处于“暂停”状态时
{
Gu8RunStatus=1; //状态切换到“启动”状态
}
vGu8BeepTimerFlag=0;
vGu16BeepTimerCnt=KEY\_VOICE\_TIME; //触发按键后,发出固定长度的声音
vGu8BeepTimerFlag=1;
vGu8KeySec=0; //响应按键服务处理程序后,按键编号必须清零,避免一直触发
break;
case 2: //2号按键。【停止】按键K2
Gu8RunStart=0; //总开关“关闭”。
Gu8RunStatus=0; //状态切换到“停止”状态
vGu8BeepTimerFlag=0;
vGu16BeepTimerCnt=KEY\_VOICE\_TIME; //触发按键后,发出固定长度的声音
vGu8BeepTimerFlag=1;
vGu8KeySec=0; //响应按键服务处理程序后,按键编号必须清零,避免一直触发
break;
case 3: //3号按键。【方向】按键K3
//每按一次K3按键,Gu8RunDirection就在0和1之间切换,从而控制方向
if(0==Gu8RunDirection)
{
Gu8RunDirection=1;
}
else
{
Gu8RunDirection=0;
}
vGu8BeepTimerFlag=0;
vGu16BeepTimerCnt=KEY\_VOICE\_TIME; //触发按键后,发出固定长度的声音
vGu8BeepTimerFlag=1;
vGu8KeySec=0; //响应按键服务处理程序后,按键编号必须清零,避免一直触发
break;
}
}
/\* 注释二:
\* “方向”的控制,是通过Gu8RunDirection的判断,来灵活切换switch的“步骤变量”来达到
\* 随心所欲的过程控制。
\*/
void RunTask(void) //跑马灯的任务函数,放在主函数内
{
static unsigned char Su8RunStep=0; //运行的步骤
//当总开关处于“停止”并且“步骤不为0”时,强制把步骤归零,跑马灯初始化。
if(0!=Su8RunStep&&0==Gu8RunStart)
{
Su8RunStep=0; //步骤归零
//跑马灯处于初始化的状态
P1\_4=0; //第1个灯亮
P1\_5=1; //第2个灯灭
P1\_6=1; //第3个灯灭
P3\_3=1; //第4个灯灭
}
switch(Su8RunStep) //屡见屡爱的switch又来了
{
case 0:
if(1==Gu8RunStart) //总开关“打开”
{
vGu8RunTimerFlag=0;
vGu16RunTimerCnt=0; //定时器清零
Su8RunStep=1; //切换到下一步,启动
}
break;
case 1:
if(1==Gu8RunStatus&&0==vGu16RunTimerCnt) //当前处于“启动”状态,并且定时器等于0
{
P1\_4=0; //第1个灯亮
P1\_5=1; //第2个灯灭
P1\_6=1; //第3个灯灭
P3\_3=1; //第4个灯灭
vGu8RunTimerFlag=0;
vGu16RunTimerCnt=RUN\_TIME; //用于控制跑马灯跑动速度的定时器
vGu8RunTimerFlag=1; //启动定时器
//灵活切换“步骤变量”
if(0==Gu8RunDirection) //往右跑
{
Su8RunStep=2;
}
else //往左跑
{
Su8RunStep=4;
}
}
break;
case 2:
if(1==Gu8RunStatus&&0==vGu16RunTimerCnt) //当前处于“启动”状态,并且定时器等于0
{
P1\_4=1; //第1个灯灭
P1\_5=0; //第2个灯亮
P1\_6=1; //第3个灯灭
P3\_3=1; //第4个灯灭
vGu8RunTimerFlag=0;
vGu16RunTimerCnt=RUN\_TIME; //用于控制跑马灯跑动速度的定时器
vGu8RunTimerFlag=1; //启动定时器
//灵活切换“步骤变量”
if(0==Gu8RunDirection) //往右跑
{
Su8RunStep=3;
}
else //往左跑
{
Su8RunStep=1;
}
}
break;
case 3:
if(1==Gu8RunStatus&&0==vGu16RunTimerCnt) //当前处于“启动”状态,并且定时器等于0
{
P1\_4=1; //第1个灯灭
P1\_5=1; //第2个灯灭
P1\_6=0; //第3个灯亮
P3\_3=1; //第4个灯灭
vGu8RunTimerFlag=0;
vGu16RunTimerCnt=RUN\_TIME; //用于控制跑马灯跑动速度的定时器
vGu8RunTimerFlag=1; //启动定时器
//灵活切换“步骤变量”
if(0==Gu8RunDirection) //往右跑
{
Su8RunStep=4;
}
else //往左跑
{
Su8RunStep=2;
}
}
break;
case 4:
if(1==Gu8RunStatus&&0==vGu16RunTimerCnt) //当前处于“启动”状态,并且定时器等于0
{
P1\_4=1; //第1个灯灭
P1\_5=1; //第2个灯灭
P1\_6=1; //第3个灯灭
P3\_3=0; //第4个灯亮
vGu8RunTimerFlag=0;
vGu16RunTimerCnt=RUN\_TIME; //用于控制跑马灯跑动速度的定时器
vGu8RunTimerFlag=1; //启动定时器
//灵活切换“步骤变量”
if(0==Gu8RunDirection) //往右跑
{
Su8RunStep=1;
}
else //往左跑
{
Su8RunStep=3;
}
}
break;
}
}
- 首页
- 第一节:我的价值观
- 第二节:初学者的疑惑
- 第三节:单片机最重要的一个特性
- 第四节:平台软件和编译器软件的简介
- 第五节:用Keil2软件关闭,新建,打开一个工程的操作流程
- 第六节:把.c源代码编译成.hex机器码的操作流程
- 第七节:本节预留
- 第八节:把.hex机器码程序烧录到单片机的操作流程
- 第九节:本节预留
- 第十节:程序从哪里开始,要到哪里去?
- 第十一节:一个在单片机上练习C语言的模板程序
- 第十二节:变量的定义和赋值
- 【TODO】第十三节:赋值语句的覆盖性
- 【TODO】第十四节:二进制与字节单位,以及常用三种变量的取值范围
- 【TODO】第十五节:二进制与十六进制
- 【TODO】第十六节:十进制与十六进制
- 【TODO】第十七节:加法运算的5种常用组合
- 【TODO】第十八节:连加、自加、自加简写、自加1
- 【TODO】第十九节:加法运算的溢出
- 【TODO】第二十节:隐藏中间变量为何物?
- 【TODO】第二十一节:减法运算的5种常用组合。
- 【TODO】第二十二节:连减、自减、自减简写、自减1
- 【TODO】第二十三节:减法溢出与假想借位
- 【TODO】第二十四节:借用unsigned long类型的中间变量可以减少溢出现象
- 【TODO】第二十五节:乘法运算中的5种常用组合
- 【TODO】第二十六节:连乘、自乘、自乘简写,溢出
- 【TODO】第二十七节:整除求商
- 【TODO】第二十八节:整除求余
- 【TODO】第二十九节:“先余后商”和“先商后余”提取数据某位,哪家强?
- 【TODO】第三十节:逻辑运算符的“与”运算
- 【TODO】第三十一节:逻辑运算符的“或”运算
- 【TODO】第三十二节:逻辑运算符的“异或”运算
- 【TODO】第三十三节:逻辑运算符的“按位取反”和“非”运算
- 【TODO】第三十四节:移位运算的左移
- 【TODO】第三十五节:移位运算的右移
- 【TODO】第三十六节:括号的强制功能---改变运算优先级
- 【TODO】第三十七节:单字节变量赋值给多字节变量的疑惑
- 【TODO】第三十八节:第二种解决“运算过程中意外溢出”的便捷方法
- 【TODO】第三十九节:if判断语句以及常量变量的真假判断
- 【TODO】第四十节:关系符的等于“==”和不等于“!=”
- 【TODO】第四十一节:关系符的大于“>”和大于等于“>=”
- 【TODO】第四十二节:关系符的小于“<”和小于等于“<=”
- 【TODO】第四十三节:关系符中的关系符:与“&&”,或“||”
- 【TODO】第四十四节:小括号改变判断优先级
- 【TODO】第四十五节: 组合判断if...else if...else
- 【TODO】第四十六节: 一维数组
- 【TODO】第四十七节: 二维数组
- 【TODO】第四十八节: while循环语句
- 【TODO】第四十九节: 循环语句do while和for
- 【TODO】第五十节: 循环体内的continue和break语句
- 【TODO】第五十一节: for和while的循环嵌套
- 【TODO】第五十二节: 支撑程序框架的switch语句
- 【TODO】第五十三节: 使用函数的三要素和执行顺序
- 【TODO】第五十四节: 从全局变量和局部变量中感悟“栈”为何物
- 【TODO】第五十五节: 函数的作用和四种常见书写类型
- 【TODO】第五十六节: return在函数中的作用以及四个容易被忽略的功能
- 【TODO】第五十七节: static的重要作用
- 【TODO】第五十八节: const(./book/或code)在定义数据时的作用
- 【TODO】第五十九节: 全局“一键替换”功能的#define
- 【TODO】第六十节: 指针在变量(./book/或常量)中的基础知识
- 【TODO】第六十一节: 指针的中转站作用,地址自加法,地址偏移法
- 【TODO】第六十二节: 指针,大小端,化整为零,化零为整
- 【TODO】第六十三节: 指针“化整为零”和“化零为整”的“灵活”应用
- 【TODO】第六十四节: 指针让函数具备了多个相当于return的输出口
- 【TODO】第六十五节: 指针作为数组在函数中的入口作用
- 【TODO】第六十六节: 指针作为数组在函数中的出口作用
- 【TODO】第六十七节: 指针作为数组在函数中既“入口”又“出口”的作用
- 【TODO】第六十八节: 为函数接口指针“定向”的const关键词
- 【TODO】第六十九节: 宏函数sizeof(./book/)
- 【TODO】第七十节: “万能数组”的结构体
- 【TODO】第七十一节: 结构体的内存和赋值
- 【TODO】第七十二节: 结构体的指针
- 【TODO】第七十三节: 结构体数据的传输存储和还原
- 【TODO】第七十四节: 结构体指针在函数接口处的频繁应用
- 【TODO】第七十五节: 指针的名义(例:一维指针操作二维数组)
- 【TODO】第七十六节: 二维数组的指针
- 【TODO】第七十七节: 指针唯一的“单向输出”通道return
- 【TODO】第七十八节: typedef和#define和enum
- 【TODO】第七十九节: 各种变量常量的命名规范
- 【TODO】第八十节: 单片机IO口驱动LED
- 【TODO】第八十一节: 时间和速度的起源(指令周期和晶振频率)
- 【TODO】第八十二节: Delay“阻塞”延时控制LED闪烁
- 【TODO】第八十三节: 累计主循环的“非阻塞”延时控制LED闪烁
- 【TODO】第八十四节: 中断与中断函数
- 【TODO】第八十五节: 定时中断的寄存器配置
- 【TODO】第八十六节: 定时中断的“非阻塞”延时控制LED闪烁
- 【TODO】第八十七节: 一个定时中断产生N个软件定时器
- 【TODO】第八十八节: 两大核心框架理论(四区一线,switch外加定时中断)
- 【TODO】第八十九节: 跑马灯的三种境界
- 【TODO】第九十节: 多任务并行处理两路跑马灯
- 【TODO】第九十一节: 蜂鸣器的“非阻塞”驱动
- 【TODO】第九十二节: 独立按键的四大要素(自锁,消抖,非阻塞,清零式滤波)
- 【TODO】第九十三节: 独立按键鼠标式的单击与双击
- 【TODO】第九十四节: 两个独立按键构成的组合按键
- 【TODO】第九十五节: 两个独立按键的“电脑键盘式”组合按键
- 【TODO】第九十六节: 独立按键“一键两用”的短按与长按
- 【TODO】第九十七节: 独立按键按住不松手的连续均匀触发
- 【TODO】第九十八节: 独立按键按住不松手的“先加速后匀速”的触发
- 【TODO】第九十九节: “行列扫描式”矩阵按键的单个触发(原始版)
- 【TODO】第一百节: “行列扫描式”矩阵按键的单个触发(优化版)
- 【TODO】第一百零一节: 矩阵按键鼠标式的单击与双击
- 【TODO】第一百零二节: 两个“任意行输入”矩阵按键的“有序”组合触发
- 【TODO】第一百零三节: 两个“任意行输入”矩阵按键的“无序”组合触发
- 【TODO】第一百零四节: 矩阵按键“一键两用”的短按与长按
- 【TODO】第一百零五节: 矩阵按键按住不松手的连续均匀触发
- 【TODO】第一百零六节: 矩阵按键按住不松手的“先加速后匀速”触发
- 【TODO】第一百零七节: 开关感应器的识别与软件滤波
- 【TODO】第一百零八节: 按键控制跑马灯的启动和暂停和停止
- 【TODO】第一百零九节: 按键控制跑马灯的方向
- 【TODO】第一百一十节: 按键控制跑马灯的速度
- 第一百一十一节: 工业自动化设备的开关信号的运动控制
- 【TODO】第一百一十二节: 数码管显示的基础知识
- 【TODO】第一百一十三节: 动态扫描的数码管显示数字
- 【TODO】第一百一十四节: 动态扫描的数码管显示小数点
- 【TODO】第一百一十五节: 按键控制数码管的秒表
- 【TODO】第一百一十六节: 按键控制数码管的倒计时
- 【TODO】第一百一十七节: 按键切换数码管窗口来设置参数
- 【TODO】第一百一十八节: 按键让某位数码管闪烁跳动来设置参数
- 【TODO】第一百一十九节: 一个完整的人机界面的程序框架的脉络
- 【TODO】第一百二十节: 按键切换窗口切换局部来设置参数
- 【TODO】第一百二十一节: 可调参数的数码管倒计时
- 【TODO】第一百二十二节: 利用定时中断做的“时分秒”数显时钟
- 【TODO】第一百二十三节: 一种能省去一个lock自锁变量的按键驱动程序
- 【TODO】第一百二十四节: 数显仪表盘显示“速度、方向、计数器”的跑马灯
- 【TODO】第一百二十五节: “双线”的肢体接触通信
- 【TODO】第一百二十六节: “单线”的肢体接触通信
- 【TODO】第一百二十七节: 单片机串口接收数据的机制
- 【TODO】第一百二十八节: 接收“固定协议”的串口程序框架
- 【TODO】第一百二十九节: 接收带“动态密匙”与“累加和”校验数据的串口程序框架
- 【TODO】第一百三十节: 接收带“动态密匙”与“异或”校验数据的串口程序框架
- 【TODO】第一百三十一节: 灵活切换各种不同大小“接收内存”的串口程序框架
- 【TODO】第一百三十二节:“转发、透传、多种协议并存”的双缓存串口程序框架
- 【TODO】第一百三十三节:常用的三种串口发送函数
- 【TODO】第一百三十四节:“应用层半双工”双机串口通讯的程序框架